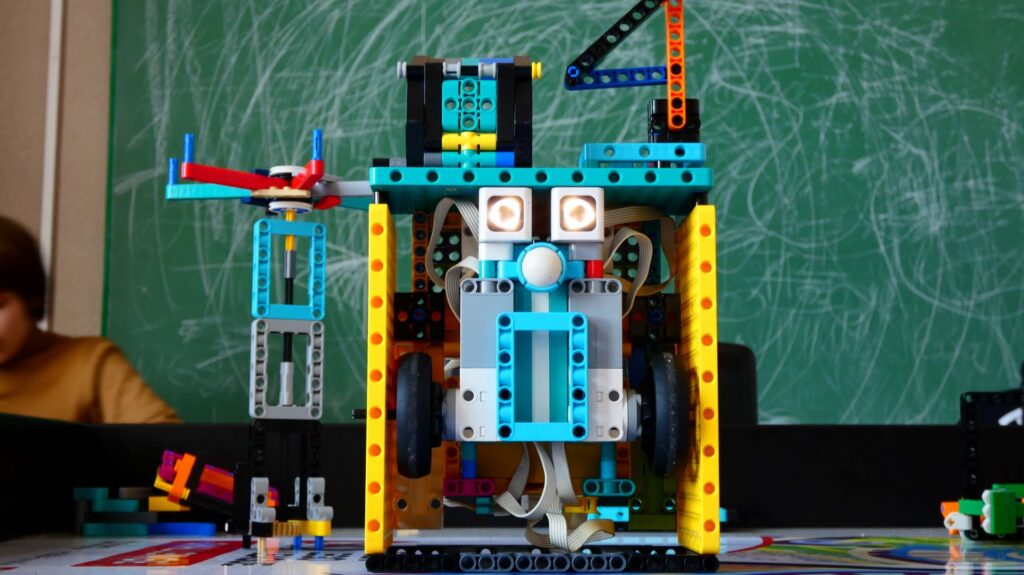
U našem robotu imamo 4 motora, od kojih su 2 za kretanje. Od senzora imamo 2 senzora za boju i žiroskop. Senzore za boju smo prvobitno koristili, ali smo primetili da nam je robot tačniji i brži bez njih, ali smo ih ostavili u robotu jer nam možda nekad zatrebaju.
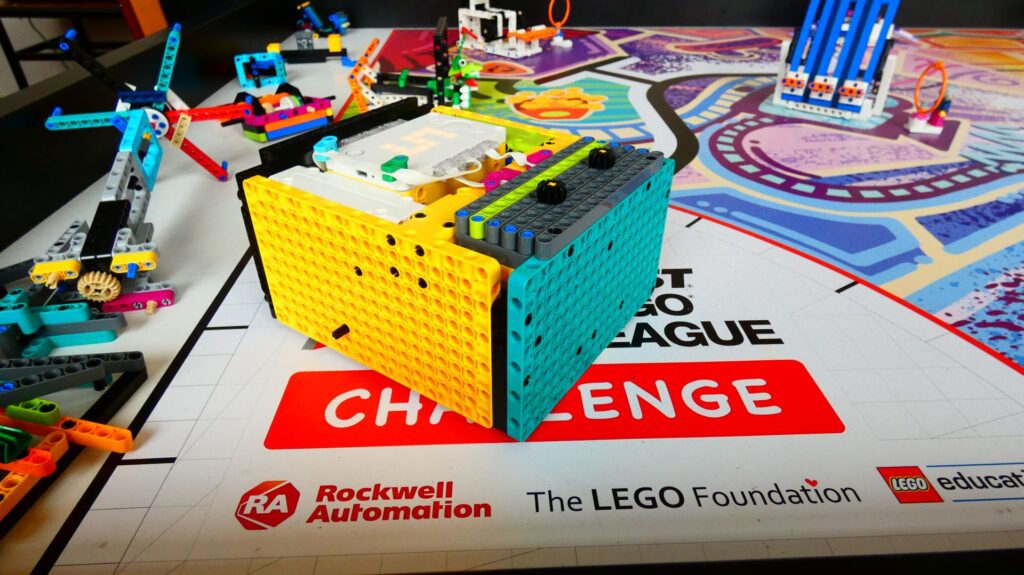
Mi smo odlučili da naseg robota napravimo četvrtastog zbog više razloga:
Da bismo lakše stavljali nastavke
Da bi mu masa bila simetrično raspoređena
Da bismo mogli lakše ga postavljamo uz zid
Zupčanike smo stavili na sam vrh robota da bismo lakše prikačili nastavke.
U početku smo koristili veće zupčanike ali smo shvati da je bolje da koristimo manje jer imaju veći obrni moment iako su malo sporiji.
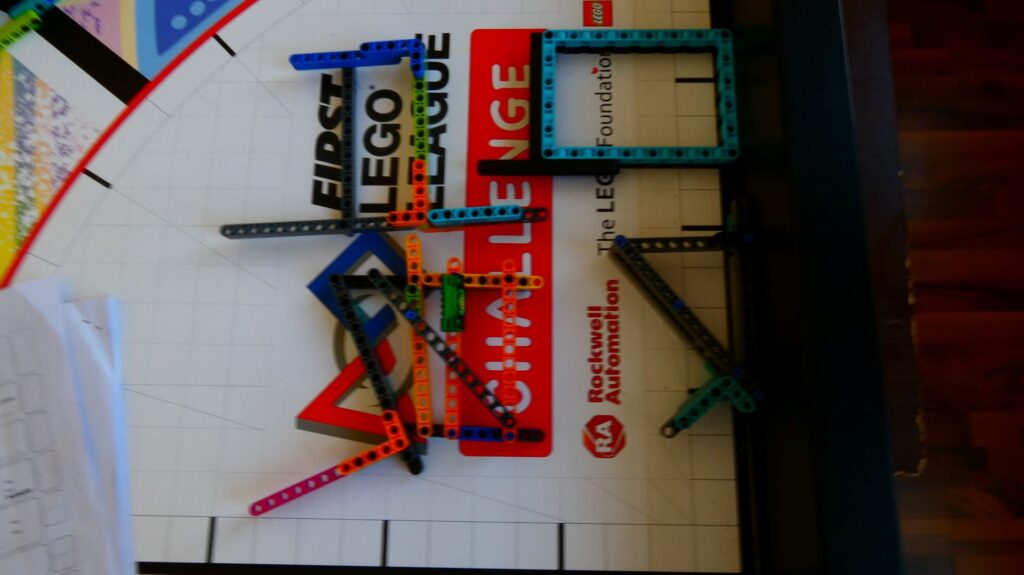
Ove godine smo odlučili da koristimo
graničnike jer smo prošle godine naučili da možemo mnogo lako da pogrešimo bez njih. Sa graničnicima mnogo brže i preciznije postavljamo robota.